Más artículos de Matemática
Movimientos. El Teorema de Cartan-Dieudonné
por Juan Manuel PÉREZ DELGADO
(Juan Manuel PÉREZ DELGADO es Profesor de Matemáticas en el Instituto de Educación Secundaria "Alarifes Ruiz Florindo", de Fuentes de Andalucía, Sevilla-Spain)
żDe cuantas maneras podemos descomponer un movimiento en un espacio euclideo n-dimensional?. Esta es la interesante cuestión que resuelve uno de los grandes teoremas de la Geometría. Veremos que el maximo del número mínimo de simetrias especulares en las que un movimiento puede descomponerse depende del número de dimensiones del espacio.
En Geometría Analítica se estudian los MOVIMIENTOS en Rn, que son funciones en Rn como Espacio Afín Euclideo.
definidas por relaciones del tipo matricial siguiente:
donde
, y M es una matriz ortogonal de orden nxn, es decir, que se verifica que M-1 = Mt.
CONSECUENCIA 1Ş:
Se tiene que los movimientos conservan las distancias entre puntos y, recíprocamente i.e., toda función de Rn en sí mismo que conserve las distancias es un movimiento.
De hecho, podemos considerar a Rn como un R-espacio vectorial y a la aplicación x't = M.xt como una aplicación lineal que normalmente se denota por
, y al ser M ortogonal son isometrías (conservan el producto escalar). Así con el producto escalar canónico podemos tomar dos puntos cualesquiera B(b1,...,b1) y C(c1,...,c1), la distancia entre ellos será:
donde
es el vector de origen B y extremo C.
Como es
tenemos que
Por tanto:
puesto que
CONSECUENCIA 2Ş:
Los movimientos de Rn se denotan normalmente por Mov(Rn) y constituyen un GRUPO.
Para ello observamos que la identidad, Id, es evidentemente un movimiento, con matriz del tipo
donde In es la matriz identidad.
Además, la composición de un movimiento y su inverso es también un movimiento, y ésto lo tendríamos observando que las matrices
son inversas una de la otra, y, por último, la composición (producto) de movimientos es otro movimiento dado que la composición de movimientos se corresponde con el producto de matrices siguientes:
que será un movimiento al tenerse que
y que M1.M2 también es ortogonal puesto que se verificaría:
CONSECUENCIA 3Ş:
Un movimiento f se denomina traslación si su ecuación matricial es
o, en forma de sistema:
donde el vector
se denomina vector de la traslación, y el movimiento f se acostumbra a denotar por
.
Pues bien, lo más importante de las traslaciones son los siguientes hechos:
a) Las traslaciones forman un subgrupo normal de Mov(Rn).
b) Las traslaciones distintas de la identidad no tienen puntos dobles.
El hecho a) es consecuencia de que el producto de matrics de la forma
da por resultado una matriz de la forma:
El hecho b) es consecuencia trivial, pues si (a1,...,an) es no nulo, entonces el sistema anterior sería incompatible, haciendose necesario que xi' = xi para obtener los puntos dobles.
CONSECUENCIA 4Ş:
La notación matricial de que hemos dotado a los movimientos nos permite, para pequeńos valores de la dimensión, describir todos los tipos de movimiento del espacio considerado, según sus ecuaciones canónicas.
Consideremos los casos:
En los casos e) y f) es
y
, así, podemos considerar
siendo
.
Estudiemos los casos por los sistemas que producen:
- Caso a):
El sistema en este caso es
sistema ya visto, pues es la traslación de vector
- Caso b):
El sistema sería
El sistema de puntos dobles es {0=a1; 0=a2; x3=1/2.a3}, que es incompatible, salvo que (a1, a2)= (0,0).
Tenemos, pues, dos subcasos a considerar:
b1): (a1, a2) = (0, 0)
El conjunto de puntos dobles de f es el plano
.
Si calculamos para P(x1, x2, x3) su imágen
, se tiene el vector
, que es un vector normal al plano p, siempre que
, y el vector nulo sí.
Se tiene, pues, que para todo punto P, su imágen es el punto f(P), único, tal que
y el punto medio de P y f(P) esté en p.
A un movimiento así se le denomina SIMETRÍA RESPECTO DEL PLANO p.
b2):
En este caso podemos descomponer el movimiento en dos, de la siguiente forma:
así, pues, f sería el producto (se puede probar que es conmutativo) de la simetría del subcaso anterior y la traslación de vector
, que es paralelo al plano p anterior.
Este movimiento se denomina SIMETRÍA CON DESPLAZAMIENTO PARALELO.
- Caso c):
El sistema sería:
Con lo cual el sistema de puntos dobles queda: {0 = a1, x2 = 1/2.a2, x3 = 1/2.a3} que es compatible con el caso a1 = 0. Otra vez es necesario estudiar dos subcasos:
c1):

Aqué el conjunto de puntos dobles es una recta de ecuación
Si tomamos un punto cualquiera P(x1,x2,x3), como f(P)=(x1, a2-x2, a3-x3), se tiene que
es un vector perpendicular a la recta de puntos dobles, y que el punto medio de P y f(P) es
que pertenece a la recta de puntos dobles. En definitiva, f verifica que a cada punto P le asocia f(P) de modo que el punto medio pertenece a la recta de puntos dobles y el vector
es perpendicular a dicha recta. A este movimiento se denomina SIMETRÍA AXIAL (de eje la recta de puntos dobles)
c2):

Si descomponemos:
se tiene que f es producto (conmutativo) de la simetría axial anterior y la traslación de vector
, que es paralelo al eje de simetría anterior. Tal tipo de movimiento se denomina SIMETRÍA AXIAL CON DESPLAZAMIENTO PARALELO.
- Caso d):
El sistema será:
Solo tendría un único punto doble
.
A un punto cualquiera P(x1, x2, x3) le asocia f(P)=(a1-x1, a2-x2, a3-x3), el punto doble PD es es único que es el punto medio entre P y su imágen f(P).
A tal movimiento f se le denomina SIMETRÍA CENTRAL de centro AD.
- Caso e):
Aquí el sistema sería:
Como
, luego
, el estudio del sistema de puntos dobles nos llevaría a:
como se tiene que
puesto que
e1):
En este caso el conjunto de puntos dobles es la recta de ecuación
cuyo vector director es paralelo a (1,0,0).
Si P=(x1,x2,x3), f(P)=(x1, a2+ax2+bx3, a3+ bx2+ax3). Su imágen es, pues, un punto con la misma primera coordenada y a la vista de cómo se transforman las dos últimas coordenadas se deduce que f actúa sobre P como un giro de angulo f, en un plano perpendicular a la recta de puntos dobles que `pasa, dicho plano, por el punto P.
A f se le denomina GIRO de eje la recta de puntos dobles.
e2):
Nuevamente descomponemos:
y siendo el producto conmutativo, f es un producto del giro del caso anterior con una traslación de vector
Tal movimiento f se denomina GIRO CON DESPLAZAMIENTO PARALELO, o más habitualmente, MOVIMIENTO HELICOIDAL
- Caso f):
Aquí el sistema sería:
Con
El sistema de puntos dobles es:
Como es
se tiene que existirá un único punto doble PD, cuyas coordenadas no explicitamos, pues solo nos interesa su existencia.
Además, como
que conmutan, y se tiene que f es el producto de un giro por una simetría planar, de plano perpendicular al eje de giro. Tal movimiento se denomina SIMETRÍA CON ROTACIÓN.
COMENTARIOS FINALES DE LA CONSECUENCIA 4Ş:
1) Según los puntos dobles de los movimientos en R3 tendríamos los siguientes casos:
Con ningún punto doble: TRASLACIONES, GIRO HELICOIDAL, SIMETRÍA CON TRASLACIÓN Con un único punto doble: SIMETRÍA CENTRAL, SIMETRÍA CON ROTACIÓN Con una recta de puntos dobles: GIRO, SIMETRÍA AXIAL Con un plano de puntos dobles: SIMETRÍA PLANAR Todo punto es doble: LA IDENTIDAD 2) Las traslaciones no son más que el producto de dos simetrías planares de planos paralelos, cuya distancia entre ellos es la mitad del módulo del vector de traslación.
Los giros son también el producto de dos simetrías planares, con planos secantes en el eje de rotación y ángulo entre ambos planos mitad del ángulo de la rotación.
Si trasladamos una simetría planar quedaría dicho movimiento descompuesto, a lo más, en el producto de tres simetrías planares.
Si giramos una simetría planar, otra vez dicho movimiento quedaría, a lo más, como el producto de tres simetrías planares.
Por último, si trasladamos un giro, o viciversa, si giramos una traslación, quedaría a lo más como el producto de cuatro simetrías planares. Y así sucesivamente, etc. etc.
Es justamente este número final, cuatro, el máximo del número mínimo en que podemos descomponer los movimientos del espacio R3 en simetrías planares, y es, en definitiva, la tesis del Teorema de Cartan-Dieudonné, que a continuación enunciamos y trataremos de probar para el caso X = Rn, con lo cual hablaremos ya de simetrías hiperplanares.
EL TEOREMA DE CARTAN-DIEUDONNÉ:
Sea X un espacio Afín Euclideo, con
. Entonces todo movimiento
se puede escribir como la composición (producto) de, a lo más, n+1 simetrías hiperplanares.
Para la demostración, podemos suponer que f no es la identidad en X, puesto que en dicho caso, f=IdX, tomando cualquier hiperplano H, consideremos que es sH la simetría hiperplanar respecto de dicho hiperplano, se tiene que
f=IdX=sHo sH=sH2 por lo cual, la identidad se descompondrá en dos simetrías hiperplanares.
Luego, si f no es la identidad en X, debe existir un punto P0 de X que no sea doble, es decir, con f(P0) distinto de P0.
Pot tanto, podemos considerar el punto medio del segmento de extremos P0 y f(P0), que denominaremos M0, y que es
(entenderemos la suma de vectores con "puntos", estos últimos considerados como vectores de posición de dichos puntos, así,
, con O orígen de coordenadas.
A partir de Mo y del vector
.
Obviamente, se puede probar que dicho hiperplano lo podemos expresar de la forma:
Además, si R es un punto doble de f,
, entonces, por ser f un movimiento se tiene que
con lo cual se tiene que
y sH la simetría hiperplanar verifica evidentemente que
y viciversa.
Consideremos ahora el movimiento
, producto de la simetría hiperplanar sH con nuestro movimiento de estudio f. Tendríamos:
a)

b)
, por hipótesis, sin embargo,
, con lo cual
.
Por tanto, deducimos que:
[*]
Como
, por hipótesis, se tendrían los siguientes casos:
1ş. Si
, entonces Df es un hiperplano, luego f es una simetría hiperplanar, es decir, f=sDf.
2ş. Si
, entonces consideramos
.
Pero si
, pero esto es una contradicción, puesto que es
Luego,
.
Es decir,f es el producto de dos simetrías hiperplanares.
3ş. Si
, entonces
, con lo cual f1 es la composición de a lo más 2 simetrías hiperplanares, así, f es a los más la composición de tres simetrías hiperplanares.
4ş. Si
llegamos por analogía a la conclusión de que f es a lo más la composición de cuatro simetrías hiperplanares.
... ... ... ...
... ... ... ...
nş. Si
, deduciremos también que f1 es a lo más la composición de n-1 simetrías hiperplanares, y f de a lo más n simetrías hiperplanares.
Por último, en el caso
, se tiene al final que f es la composición de a lo más n+1 simetrías hiperplanares.
Con esto termina la prueba del teorema.
UN EJEMPLO TEÓRICO:
Sea la traslación de vector
.
Queremos aplicar el proceso del Teorema de Cartan-Dieudonné al movimiento
.
Como en este caso ningún punto es doble por ser una traslación, sea P un punto cualquiera de X, y consideremos el hiperplano
Consideremos
.
Como
. Calculemos Df1.
a)
. Así,

b) Sea
.
Para justificar el último paso de esta igualdad tengamos en cuenta que:
1.
(puesto que
)
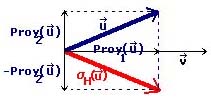
2. Y si observamos gráficamente la siguiente figura
se tiene:

Así, pues, se tiene que
, luego como
es doble
, entonces para todo punto de H' es doble, así una variedad afín que contenga a un hiperplano, o es un hiperplano o es todo el espacio. Pero si
(contradicción).
Luego es
, así
, luego
Y ya tendríamos descompuesta la traslación en producto de dos simetrías hiperplanares.













Juan Manuel PÉREZ DELGADO
41701250.averroes@juntadeandalucia.es
11 septiembre 2004
Más artículos de Matemática